
Here is a demo video:
This project was build based on idea on how to make a simple and cheap
online surveillance camera robot that everyone can build. Not only that
the robot also have to be easy to use and maintain. Using the raspberry
pi, few cheap components, a robot chassis/RC car, and webiopi tutorial
on the MagPi magazine this project was successfully build. For launching
this robot to be accessible online, ngrok service from www.ngrok.com is
used. Without any hectic and difficult port forwarding configuration
this robot now can be controlled from anyone in the world by just using
firefox or chrome browser.
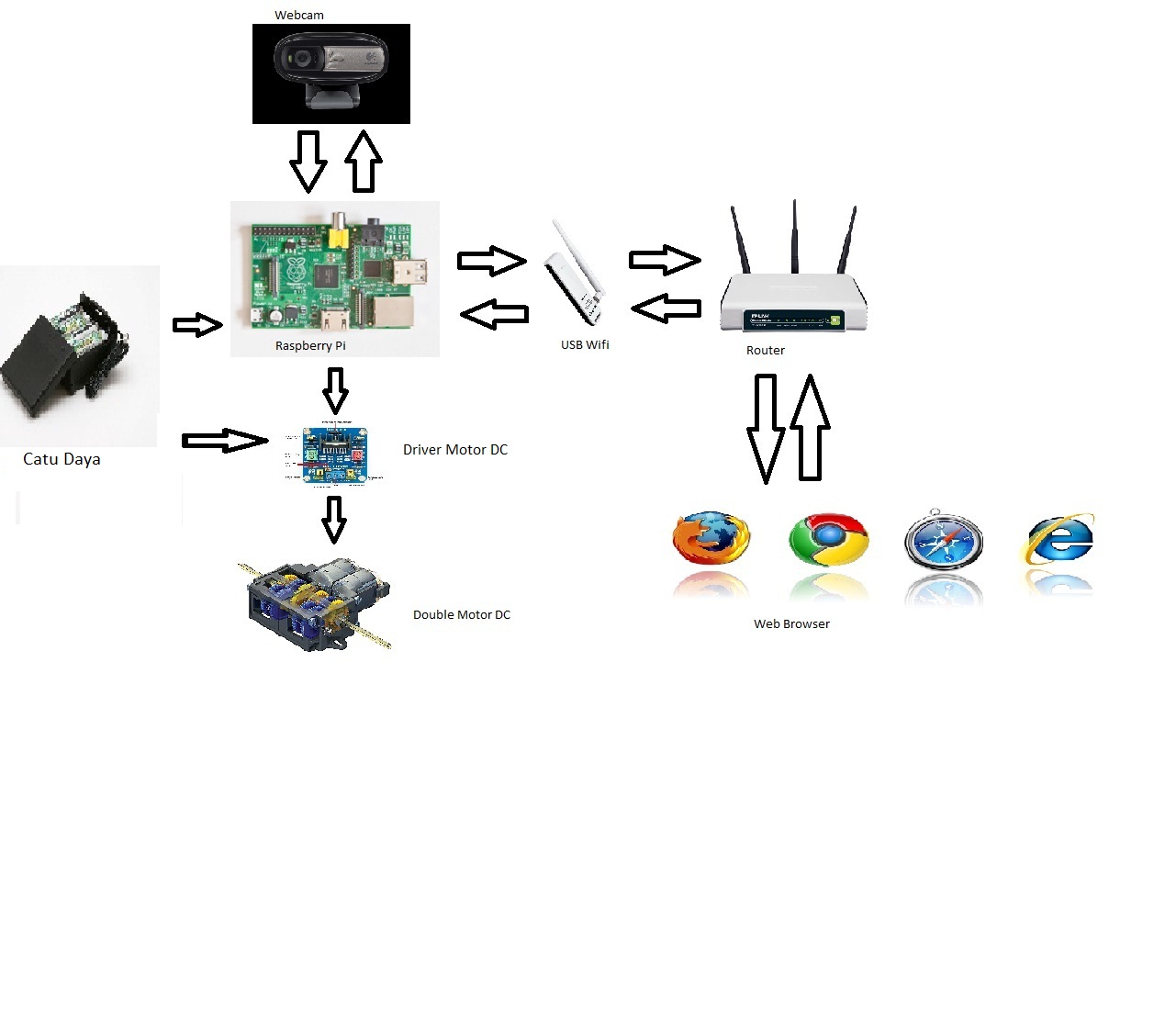
No soldering is required to build this robot because I use jumper wire to connect all necessary connection between the GPIO to the L298n motor driver module, and then i connect the two dc motor to the mounting hole on the L298n module.
Read More
Interesting blog. This is one of my favorite blog also I want you to update more post like this. Thanks for sharing this article.
ReplyDeleteHome surveillance Service in Chennai